
Autonomous Guided Vehicle
We humans have long been fantasizing of autonomous robots � walking like
us, talking like us, and thinking like us. Our effort on trying to turn this
fantasy into a reality has given birth to this project � Autonomous Guided
Vehicle (AGV).
The Autonomous Guided Vehicle (AGV) Project aspires to construct a vehicle automatically guided without wires and with some intelligence to choose the correct path of travel. For the simplest automation, the AGV would be following a line on a floor, either by image processing or by Infra-Red Emitter-Detector sensors. The image is captured by a CCD (Charged Coupled Device) Camera and sent to the frame grabber of the onboard computer. The computer processes the image and sends information to the motor drive circuits.
The AGV robot can be remotely controlled, using AM transmitter receiver operating at 418 MHz. The working range is about 70 meters.
The AGV Vehicle also has two pairs of 40 KHz ultrasonic transmitter/receiver at the front. On sensing an obstacle on the vehicle's direction of movement, the AGV stops, steers and tries again.
Thus, the AGV is a good platform for robotics. On availability of good sensors, the AGV project can be extended to make a more sophisticated robot in the future.
The Team:
Standing (L to R): Shailendra, Dipesh, Summit, Binsan, Kishor, Manoz, Yanzeev, Digdarshan, Shree Krishna
Sitting (L to R): Abhinaya and Praveen
(III Year, School of Engineering, Kathmandu University)
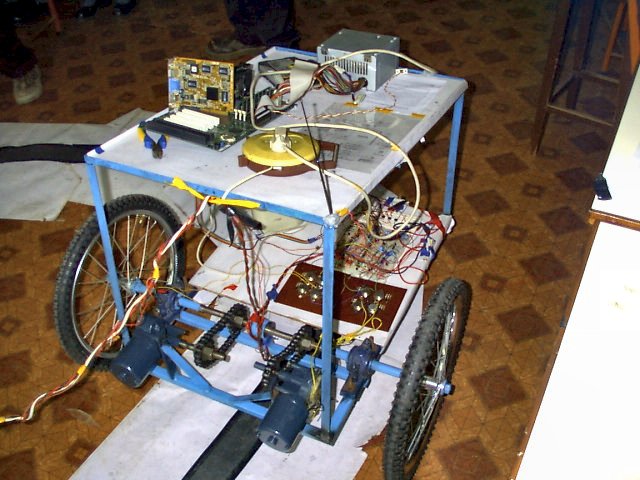
The AGV Robot
Download the Final report in PDF
Download the Full Circuit Diagram (ERRATA: 74LS125 should be 74LS126 and vice-versa)

Working... (Shailendra, Summit, and Dipesh)
In Brief:
The AGV robot finds use in offices, hospitals, and public places as a messenger, carrying things around, given that a line has been drawn on the floor from room to room. The CCD camera captures an image of the line, processes the image and decides where to go. If an obstacle is in way, the 40KHz ultrasonic sound gets reflected very soon, and the AGV robot tries to avoid the obstacle. The AGV robot can also be controlled by wireless means - that means you can call the robot to your room and place whatever you want on top of it and set in on the line to send your stuff to another room on the same floor.
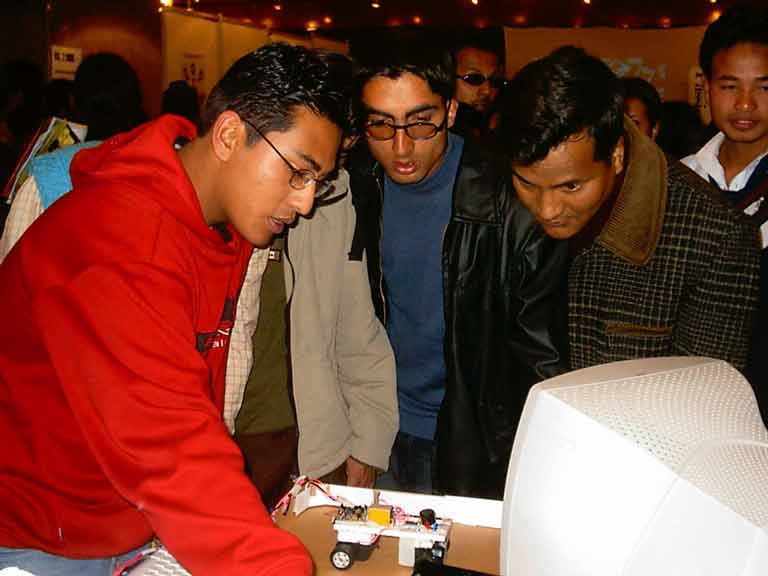
KUPEX-2002
The AGV robot was on display in the annual Project Exhibition of Kathmandu University - KUPEX-2002. It was held on July 12-13, 2002. The AGV robot secured the first place in the evaluation of the the third year combined projects.
Here are some photos:
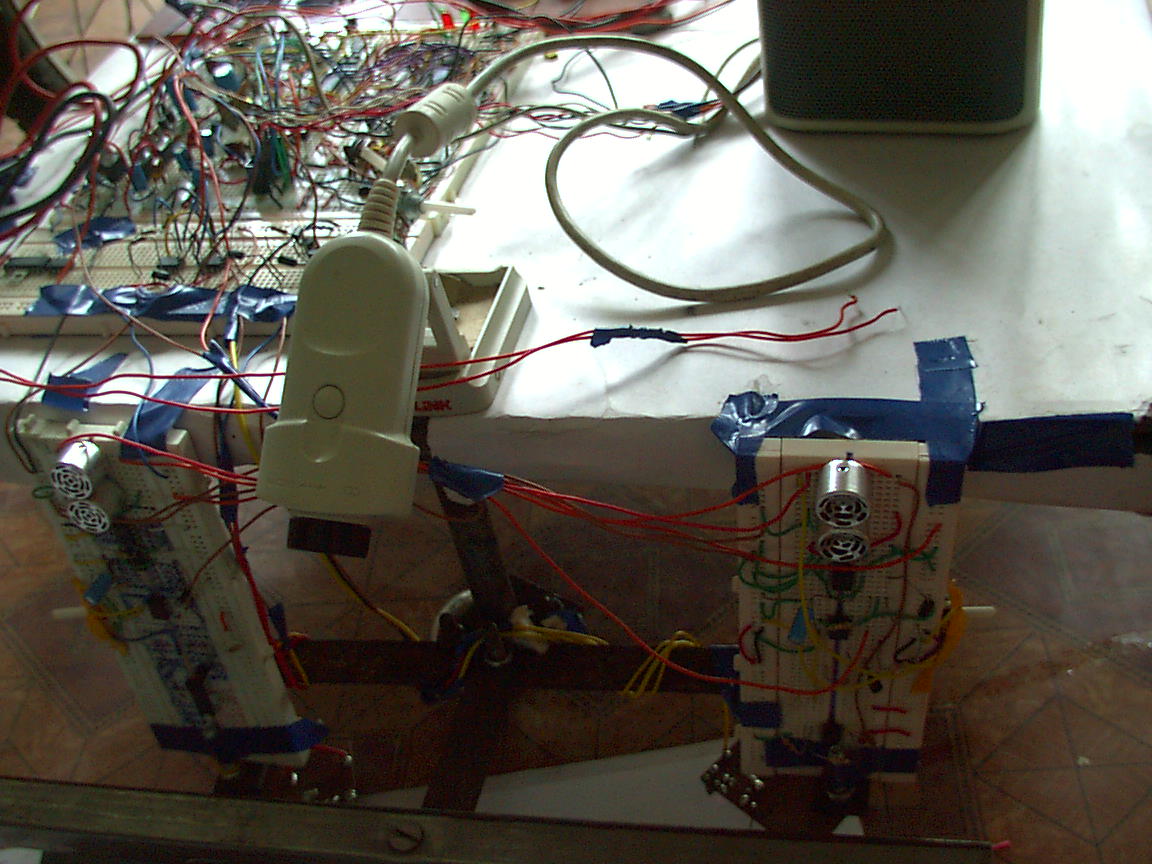
Camera, Ultrasonic Sensors, and Infrared Emitter/Detector

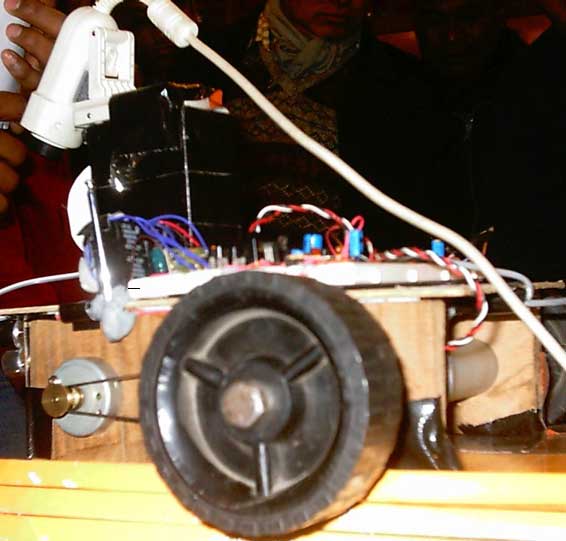
The Final Vehicle
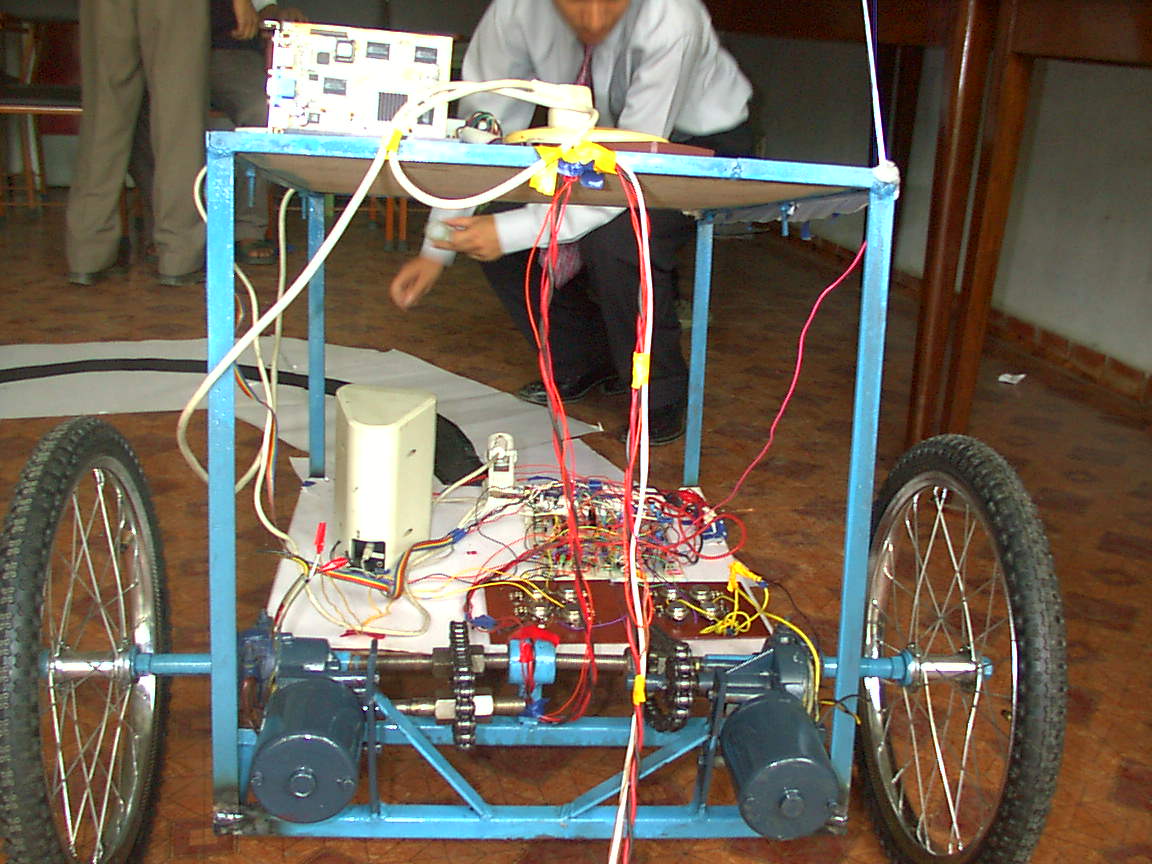
The back view

Look at the crowd! (Praveen is holding power cables. The Motor was not powerful enough to carry a heavy battery!)

The Electrical Team: Shailendra (white shirt blue tie), Summit (blue shirt blue tie), Dipesh (next to Summit), and Abhinaya (white shirt, black pant).

Last Minute Modifications ! Oops..!











Meanwhile, check out: https://summitraj.tripod.com/kubot - a small line following robot.
BACK TO HOMEPAGEJanuary 2003, Kathmandu University.
{kind=link}